CatPilot¶
CatPilot is an open-source project focused on creating scalable, transparent drones control systems. You can find it in repository here.
Project structure¶
UAS-CatPilot is a repository above catpilot project as combined operating system and Board Support Package with sensors and peripherals support. UAS-CatPilot separated as application specific layer, while CatPilot left as universal basis.
Functional and ideological core of the solutions is C-ATOM library, (see C-ATOM), which is hardware and operating system agnostic framework for creation of the embedded systems.
Inter process communication and middleware of the CatPilot framework is a Embedded Software Bus (ESWB), (see Embedded Software Bus).

Supported Hardware¶
CatPilot supports PX Cube hardware with all its variaty of carrier boards.

Helping software¶
CatPilot ecosystem has a tool to observe models and algorithms in a graphical forms using C-ATLAS tool (link below).
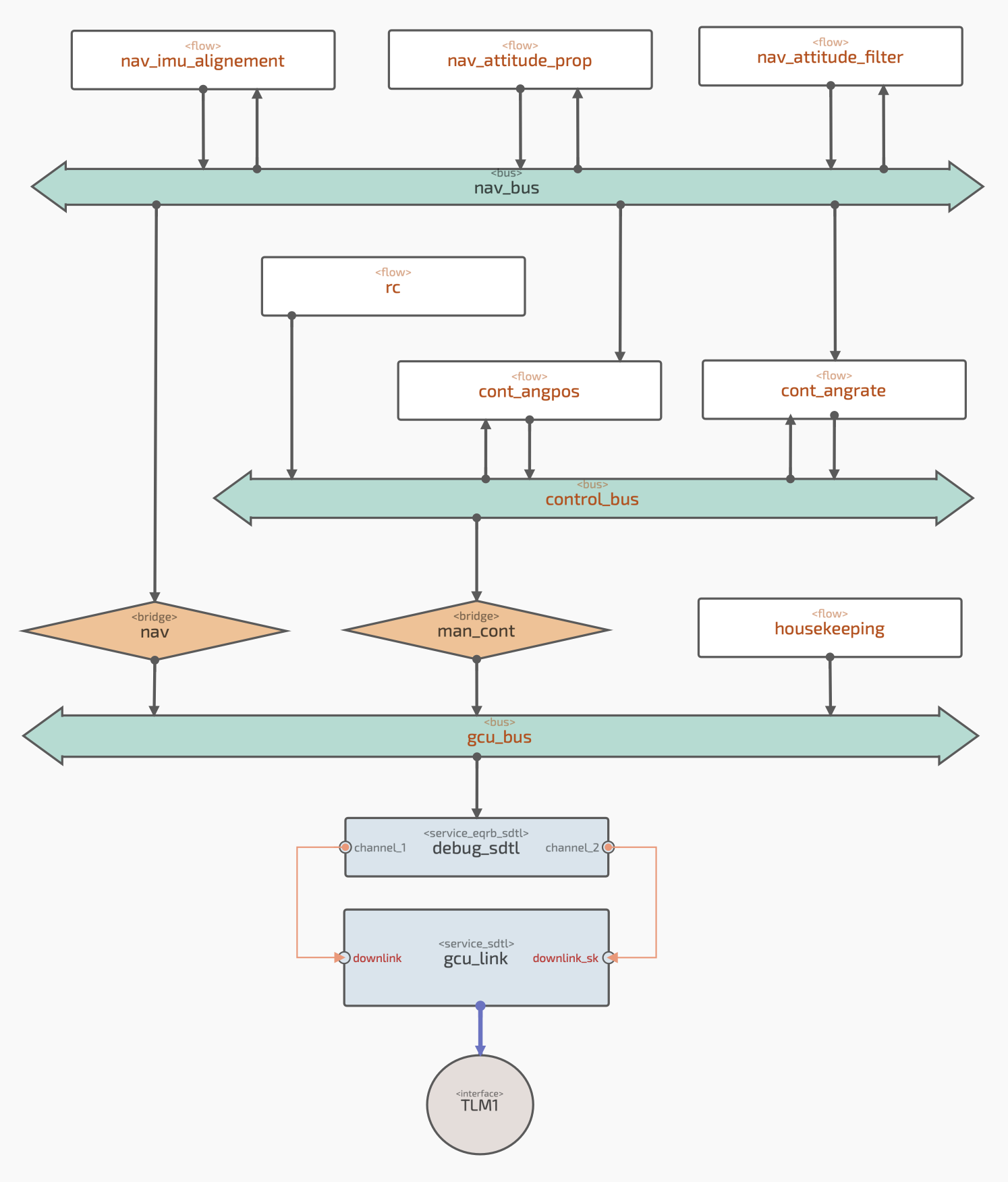
Click here to see this schematic in a web tool
- Quick start manual
Quick start manual
- Toolchain installation
Toolchain install
- Build and debug reference
Building and debugging
- Quick graphical user interfaces creation
Creating GUIs
- JetBrains Clion IDE setup
JetBrains CLion IDE recommendations
- VS Code IDE setup
VS Code IDE recommendations